







employee
The paper presents prototype wave buoy loggers designed to collect raw data from a built-in inertial motion unit without transmitting the data to the user. These buoys require maintenance but have a significantly simpler design and much lower cost compared to unattended analogs, making them particularly useful for various coastal studies. The study aims to demonstrate that measuring wave parameters in field conditions with acceptable accuracy is achievable without loss of data quality. The buoys were tested in a field exper-iment at the Black Sea Hydrophysical Sub-Satellite Polygon of Marine Hydrophysical In-stitute, Russian Academy of Sciences. Reference measurements were obtained using wire wave gauges installed on the Stationary Oceanographic Platform (44.393047°N, 33.984596°E). Three identical buoys were deployed near the platform using different mooring configurations: a heavy anchor with an elastic insert (rubber cord), a heavy an-chor without an elastic insert, and a buoy suspended directly from the platform without an anchor. Continuous measurements were conducted over seven days, during which signifi-cant wave height varied from 0.2 to 1 m, and wind speeds ranged from 0 to 15 m/s, com-ing from easterly, westerly, and northerly directions. Under these conditions, the root-mean-square error in estimating significant wave height was no more than 5–6 cm (both with and without the rubber cord), with the linear regression coefficient deviating from 1 by less than 5%. The root-mean-square errors for the spectral peak wave period and direction were 0.37–0.62 s and 50–65°, respectively. These errors are comparable to the resolution of the applied methods and the natural statistical variability of wave parameter estimates.
buoy, wave gauge, inertial measurements, wind waves, wave parameters, oceanographic platform, field experiment
Введение
В морских исследованиях часто возникает необходимость в эпизодических кратковременных наблюдениях за поверхностными волнами в рамках целевых экспериментов. Это особенно актуально в прибрежных исследованиях, напри- мер при изучении нелинейности волн в прибрежной зоне [1, 2], их взаимодей- ствия с течениями [3], формирования донных наносов [4–6], динамики пляжей и береговой линии [7, 8] и многих других [9–12]. В таких условиях применение традиционных волномерных буев, предназначенных для непрерывного
мониторинга волнения в любой точке океана, не всегда целесообразно из-за их довольно высокой стоимости. Для кратковременных прибрежных исследова- ний многие их параметры оказываются избыточными, включая автономное энергоснабжение, увеличенный объем памяти, многоканальную систему связи с берегом, массивный высокопрочный корпус. Кроме того, часто в специали- зированных экспериментах требуется до нескольких десятков таких буев, чтобы обеспечить одновременные измерения на разрезе или на сетке.
В связи с этим целесообразной представляется разработка простого измери- теля волн, имеющего только функцию записи текущих измерений с датчика, чувствительного к волновому движению, т. е. буя-логгера. Решению этой за- дачи также способствует все более широкое внедрение в волноизмерительные приборы микроэлектромеханических инерциальных датчиков весьма малого размера и стоимости [11, 13–16].
В работе представлены результаты натурных испытаний разработанного в Морском гидрофизическом институте (МГИ) прототипа такого прибора. Эксперимент проведен с использованием трех одинаковых образцов буев, но в разных вариантах их постановки. Известно, что на качество измерения волн буйковыми датчиками определенное влияние может оказывать удерживающее устройство1), 2) [2]. Поэтому для увеличения срока службы всей системы, а также для смягчения рывков при взаимодействии корпуса с крутыми волнами в якорное устройство обычно включают упругий элемент – отрезок резино- вого жгута длиной несколько метров [17]. Для наглядной демонстрации эф- фекта удерживающей линии в эксперименте осуществлено три варианта креп- ления: стандартный якорный трос без упругой вставки; трос с максимально эла- стичным элементом (в пределах, обеспечивающих удержание на время экспери- мента); методический вариант – бифилярный подвес без якоря с платформы.
Цель работы – продемонстрировать в натурных условиях, что для кратко- срочных измерений характеристик волнения с приемлемым качеством можно использовать буи-логгеры, построенные на легкодоступной элементной базе.
Материалы и методы
Оборудование
Буй собран на базе инерциального датчика MPU9250, совмещающего в себе микроэлектромеханический акселерометр, гироскоп и магнитометр. Как было показано ранее [14, 18], такие датчики, несмотря на их сравнительно низкую стоимость, пригодны для оценки характеристик морского волнения. Исходные измерения трех компонент ускорений, скоростей вращений, магнит- ного поля, а также температуры датчика с частотой дискретизации 25 Гц запи- сываются на карту памяти объемом до 32 Гб с помощью микроконтроллера Atmega328p с привязкой к мировому времени с помощью часов реального вре- мени на базе DS3231.
Схема собрана в пластиковом герметичном корпусе цилиндрической формы на плате, жестко зафиксированной в осевой плоскости корпуса. Инер- циальный датчик отдален от оси корпуса не более чем на толщину платы (1.5 мм) и смещен по вертикали так, чтобы его центр находился как можно ближе к точке, вокруг которой происходят резонансные колебания корпуса. Корпус снабжен поплавком, выполненным в виде чечевицеобразного диска с фасками диаметром 40 см из вспененного полистирола толщиной 100 мм. К нижней части корпуса прикреплен рым из нержавеющей стали, к которому через вертлюг крепится балласт (для корректировки осадки корпуса) и удер- живающий трос.
Питание осуществляется от шести литий-ионных аккумуляторов форм- фактора 18650 общей емкостью около 48 Вт·ч, расположенных в нижней части корпуса по обе стороны от платы.
В целях дополнительной проверки качества измерений с обратной сто- роны платы был размещен еще один инерциальный датчик такого же класса, но другой модели (BNO055). Оси обоих датчиков были по возможности сона- правлены (с точностью до поворота на 180°), а расстояние между центрами датчиков не превышало 4 мм.
Эксперимент
Эксперимент был проведен в октябре 2024 г. на Черноморском гидро- физическом подспутниковом полигоне вблизи стационарной океанографи- ческой платформы (рис. 1). Данные о батиметрии получены на сайте https://www.ncei.noaa.gov/products/etopo-global-relief-model.
Буй 1 был установлен на расстоянии около 200 м от платформы в точке, где глубина моря составляет около 27 м. В качестве якоря использовался ка- менный массивный груз сухой массой около 70 кг. Буй крепился к грузу с помо- щью капронового восьмипрядного шнура с сердечником диаметром 8 мм.
Буй 2 располагался на такой же глубине, но приблизительно на 50 м ближе к платформе. В отличие от первого образца, буй соединялся с якорным тросом через резиновый жгут длиной 7 м и диаметром 6 мм в нейлоновой оплетке (далее – амортизатор). Параметры этого амортизатора выбраны таким образом, чтобы не допустить его обрыв в течение эксперимента и в то же время обеспечить максимальную эластичность связи.
Буй 3 располагался между двумя выстрелами платформы на бифилярном подвесе из капронового шнура на расстоянии около 8 м от свайного основания. Целью этой постановки была оценка возможности проведения методических работ с платформы без более затратных постановок/уборок с якоря.
Длительность постановки буев 1, 2 составила около 7 сут, в то время как буй 3 использовался только в последние сутки измерений.
С платформы велись параллельные измерения параметров волнения струн- ными резистивными волнографами, обеспечивающими регистрацию уровня морской поверхности с точностью ±1 см в частотном диапазоне до 5 Гц [19, 20]. Данные измерений используются в работе в качестве референтных. Помимо этого, стандартными гидрометеорологическими приборами проводились вспомо- гательные метеонаблюдения. В частности, скорость и направления ветра на высоте 21 м измеряли с помощью чашечного анеморумбографа.
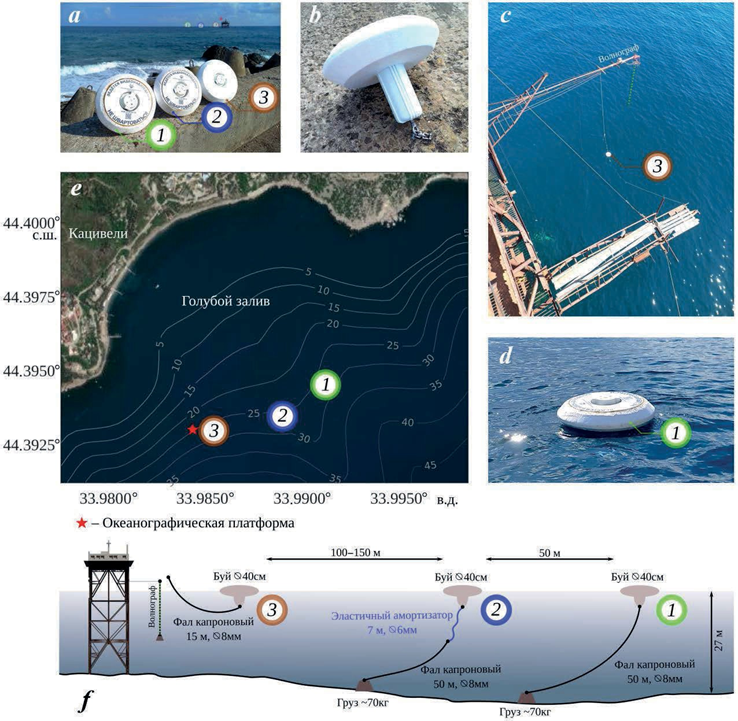
Р и с . 1 . Схема проведения натурного эксперимента: а, b – внешний вид буев; c – постановка буя 3 с платформы; d – постановка буя 1 на якоре; e – спутниковое изображение места проведения эксперимента с батиметрией (URL: https://www.arcgis.com/apps/View/index.html?appid=504e3ff67457481e 839bb941a709350f) (дата обращения: 25.08.2025); f – схематичный разрез по глубине, показывающий различия в постановке
F i g . 1 . Field experiment setup: a, b – buoy exterior design; c – deployment of Buoy 3 from the platform; d – deployment of Buoy 1 with anchor; e – satellite image of the study site with bathymetry overlay (URL: https://www.arcgis.com/apps/View/in- dex.html?appid=504e3ff67457481e839bb941a709350f) (Date of access : 25 August 2025); f – schematic depth profile illustrating buoy deployment configurations
Методика обработки данных
В работе исходными данными измерений буями являются временны́е ряды трех компонент ускорений, скоростей вращений и магнитного поля, струнными волнографами – синхронные измерения возвышений морской по- верхности в шести точках (центр и вершины пятиугольника радиусом 25 см). Для оценки характеристик волнения использован хорошо известный метод, описанный в [21], позволяющий получить оценку частотно-углового спектра
в виде усеченного ряда Фурье по данным измерений вертикальных смещений и уклонов в двух ортогональных плоскостях:
S(f, θ) = a0+ ∑ an cos(nθ) + bnsin(nθ), (1)
где f – частота; q – направление распространения волн (в соответствии с при- нятым соглашением, угол θ отсчитывается по часовой стрелке от направления на север и обозначает направление, откуда приходят волны).
Для измерений струнными волнографами мгновенные уклоны z и возвы- шение z оценивали путем аппроксимации (методом наименьших квадратов) плоскостью шести возвышений в точках с известными горизонтальными коор- динатами. Коэффициенты для формулы (1) в этом случае имеют вид
a0= C11⁄π, a1= Q12⁄k π, b1= Q13⁄k π,
a2= (C11 – C22)⁄k2 π, b2=2 C23⁄k2 π, (2)
где Сmn и Qmn – соответственно действительная и мнимая части оценки спектра Smn = Сmn + iQmn. Нижние индексы указывают на параметры, спектр которых рассчитывается: 1 – возвышения; 2 – уклоны z x в направлении восток – запад; 3 – уклоны z y в направлении север – юг. Волновое число рассчитано по дисперси- онному соотношению k = (2πf)2⁄g, где g – ускорение свободного падения.
В случае измерений буями вместо возвышений использовались вертикаль- ные ускорения в предположении, что буй идеально следует уклонам волн. В этом случае соотношения (2) принимают вид
a0= C11⁄π (2πf)4, a1= Q12⁄k π (2πf)2, b1= Q13⁄k π (2πf)2,
a2= (C22 – C33)⁄k2 π, b2=2 C23⁄k2 π,
где 1 обозначает вертикальное ускорение. Уклоны вычисляли аналогично [14] из измеренных скоростей вращения h с учетом текущей ориентации буя отно- сительно севера:
ηx = – (η0xsin(ϕ) + η0ycos(ϕ)) , ηy = – (η0xcos(ϕ) – η0ysin(ϕ)) ,
где η0x, η0y – измеренные гироскопом скорости вращения, а азимутальный угол f с поправкой на текущее магнитное склонение в месте проведения экс- перимента (7.3°) определялся по горизонтальным компонентам измеренного магнитного поля: f = Arg(mx + i my). Неизвестные сдвиги в измерениях маг- нитного поля, возникающие из-за намагниченности деталей буя, определялись из условия постоянства абсолютной величины вектора напряженности геомаг- нитного поля М:
(mix – m0x)2 + (miy − m0y)2 + (miz – m0z)2 = M 2,
где mix, miy, miz – измерения магнитометра в i-й момент времени.
По рассчитанным одномерным спектрам возвышений S (f ) = π a0 оцени- вали высоту значительных волн:
Hs = 4√∫ S (f)df,
где нижний предел интегрирования f1 определяли по признаку первого локаль- ного минимума в спектре возвышений во избежание низкочастотных помех,
присущих измерениям буйковыми датчиками [22] (для измерений струнным волнографом эта проблема не актуальна).
Частоту спектрального пика fp и соответствующий ее период Tp опреде- ляли по признаку максимума спектра возвышений при условии f > f1.
Среднее направление волн qp , соответствующих спектральному пику, со- гласно [21], равно q𝑝 = Arg(a1 + i b1).
Записи разбивали на одноминутные последовательные фрагменты, по ко-
торым рассчитывали квадраты Фурье-образов, усредняемые в дальнейшем по 30-минутным интервалам для получения оценки спектра (формула (1)).
Результаты
Частотные спектры возвышений, оцененные по измерениям волнографов и буев 1, 2, показаны на рис. 2 как функция времени для всего периода изме- рений (результаты для буя 3, установленного на существенно более короткий промежуток времени, для краткости не показаны). Скорость ветра за это время (рис. 2, a) менялась в пределах от 0 до 15 м/с при восточном, западном и север- ном направлениях. Таким образом, за неделю эксперимента удалось провести измерения в наиболее типичных для данной акватории условиях.
Как видно из рис. 2, b, показывающего референтные спектры, наблюда- лись ситуации затухающего волнения и зыби (3 октября), развития ветровых волн (7 и 9 октября), присутствия нескольких пиков в спектре (4, 8, 9 октября). Такие же особенности наблюдаются и в спектрах, построенных по данным из- мерений буями 1, 2. Отличия от референтных спектров заключаются в зани- женной высокочастотной части f > 1.5 Гц и завышенной низкочастотной части f < fp. Первый эффект возникает из-за слабого отклика корпуса на волны, длина которых меньше его характерного размера [23]. Этот эффект не оказывает су- щественного влияния на оценки значительной высоты волн из-за довольно быстрого спада спектра возвышений с частотой f –4. Второй эффект может вы- звать серьезные ошибки в оценках высот волн, как показано, например, в [22]. Именно поэтому оценка Hs в данной работе выполняется не по всему спектру, а начиная с частоты f1, в качестве которой выбрана частота первого локального минимума в спектре возвышений. Такой подход эквивалентен высокочастот- ной фильтрации, которая обычно применяется при обработке данных исход- ных измерений, получаемых с помощью буев 1). Однако для измерений струн- ным волнографом такая операция избыточна, поскольку спектральная плот- ность на низких частотах (ниже пиковой) на несколько порядков меньше, чем в области спектрального максимума.
Временны́е ряды высот значительных волн, рассчитанные таким образом, изображены на рис. 3, b. Отметим, что, несмотря на отсутствие дополнитель- ной калибровки, результаты показывают хорошее соответствие между дан- ными измерений волнографом и всеми тремя образцами буев для всех исполь- зованных типов постановки.
Различия с данными измерений, полученными датчиком BNO055, на этом рисунке не превышают толщины линии графика и поэтому здесь не показаны. Таким образом, совпадение результатов у шести образцов датчиков двух раз- ных моделей свидетельствует о том, что заводская калибровка датчиков этого класса обеспечивает заявленную точность (обычно в пределах нескольких про- центов).

Р и с . 2 . Скорость и направление ветра (a) во время эксперимента, эволюция частотного спектра по измерениям: волнографа (b), буя 1 без амортизатора (c), буя 2 с амортизатором (d)
F i g . 2 . Wind speed and direction (a) during the experiment, frequency spectrum evolution from measurements of (b) wave gauge, (c) Buoy 1 without rubber cord, (d) Buoy 2 with rubber cord
Между тем значительно более существенные различия вызваны присут- ствием в удерживающем устройстве эластичного амортизатора, например та- кие различия хорошо видны на участках графиков 6 и 7 октября. Примеча- тельно, что разность между измеренной и референтной высотами волн в этих двух случаях имеет разный знак. Связано это, предположительно, с весьма сложной картиной течений, которая наблюдалась в дни эксперимента. Часто довольно сильное течение было направлено против ветра и волн. Однако вли- яние течений заслуживает отдельного исследования, и этот вопрос оставлен за рамками данной работы.
Анализ рассчитанных периодов волн спектрального пика (рис. 3, c) показы- вает хорошее соответствие наблюдений с референтными значениями. Однако в случаях молодого волнения на фоне зыби (4 и 9 октября) наблюдались рас- хождения, когда близкие по амплитуде спектральные пики на разных частотах создавали эффект, аналогичный дребезгу. Примечательно, что при использо- вании амортизатора (буй 2, оранжевая линия) этот эффект проявлялся значи- тельно слабее.

Р и с . 3 . Скорость и направление ветра (a) во время эксперимента, временны́е ряды параметров волн, оцененные по данным измерений волнографом (черная кривая) и буями 1 (синяя кривая), 2 (оранжевая кривая), 3 (зеленая кривая): b – высота значительных волн; c – период волн спектрального пика; d – направление волн спектрального пика
F i g . 3 . Wind speed and direction (a) during the experiment, time series of wave parameters estimated from measurements of wave gauge (black) and Buoys 1 (blue), 2 (orange), 3 (green): b – significant wave height, c – spectral peak wave period, d – spectral peak wave direction
Наибольшие расхождения с референтными измерениями наблюдаются в оценках направлений волн спектрального пика (рис. 3, d). Хотя средние значе- ния определяются достаточно точно, отмечаются кратковременные выбросы, преимущественно при слабых ветрах (между 3 и 4 октября, а также после 8 ок- тября). Отметим, что аналогичные особенности, хотя и менее выраженные, ха- рактерны для референтных измерений струнным волнографом, что связано со спецификой алгоритма расчета направленного спектра, ограниченного пер- выми пятью членами ряда Фурье (формула (1)). Использование амортизатора улучшает точность расчета направлений (см., например, рис. 3, d, синяя кривая после 8 октября). Не совсем стандартный бифилярный подвес с платформы по- казал неожиданно малый разброс относительно референтных значений.
Диаграммы рассеяния для трех обсуждаемых параметров волнения Hs, Tp
и qp, показаны на рис. 4 вместе с некоторыми статистическими метриками.
Для буев 1, 2, наиболее обеспеченных данными, можно отметить довольно вы- сокие значения коэффициента корреляции для высот значительных волн – бо- лее 0.93 при отклонении коэффициента линейной регрессии от единицы не бо- лее чем на 5 %. Среднеквадратичная ошибка измерений составила ~ 6 см для постановок с амортизатором и 5 см без него. При этом следует иметь в виду, что измерения проводились в разнесенных в пространстве точках, поэтому не- малая часть этой ошибки связана со статистическим разбросом значений Hs, который обычно составляет 10–15 % 1).

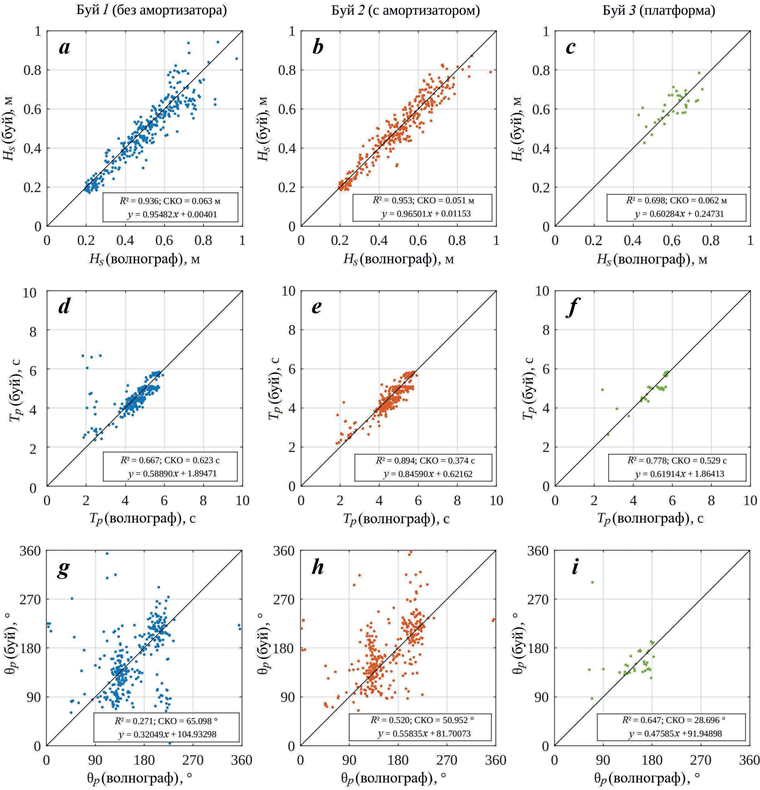
Р и с . 4 . Параметры волн: высота значительных волн (a, b, c); период волн спек- трального пика (d, e, f); направление волн спектрального пика (g, h, i), полученные буем 1 без амортизатора (a, d, g), буем 2 с амортизатором (b, e, h); буем 3 с плат- формы (c, f, i) в сравнении с данными референтных измерений волнографом
F i g . 4 . Wave parameters: significant wave height (a, b, c), spectral peak wave period (d, e, f), spectral peak wave direction (g, h, i) obtained by Buoy 1 (without rubber cord) (a, d, g), Buoy 2 (with rubber cord) (b, e, h), Buoy 3 (platform deployment) (c, f, i) compared with reference wave gauge measurements
Согласованность между оцененными и референтными значениями перио- дов волн пика Tp ниже, как обсуждалось ранее, вследствие описанного выше эффекта дребезга. Между тем, если исключить из рассмотрения явные вы- бросы, коэффициент корреляции достигает значений, сопоставимых с точно- стью оценки высот волн.
Наибольшие расхождения с референтными данными измерений наблюда- ются для направлений волн в диапазоне 50–65° (рис. 4, g, h, i), что согласуется с анализом временны́х рядов (см. рис. 3, d). Впрочем, это отклонение сопоста- вимо с разрешающей способностью используемого метода (около 90°) 1) [21].
Использование эластичного амортизатора во всех случаях улучшает каче- ство оценки по сравнению с референтными значениями, хотя это улучшение едва ли можно назвать существенным несмотря на то, что намеренно был вы- бран максимально эластичный (но минимально надежный) амортизатор.
Заключение
В работе представлены результаты натурных испытаний разработанных в МГИ волноизмерительных буев-логгеров, которые имеют максимально упрощенную конструкцию и осуществляют только сбор данных исходных из- мерений на карту памяти.
Эксперимент проведен вблизи стационарной океанографической плат- формы МГИ. Три образца, имеющие одинаковую внутреннюю конструкцию, протестированы в трех разных вариантах постановки: без эластичного аморти- затора, с амортизатором, на подвесе с платформы. Сравнение с референтными данными, в качестве которых использованы результаты измерений струнными волнографами, показало хорошее соответствие всех оценок, полученных с ис- пользованием всех трех вариантов постановки. Например, в наблюдавшемся диа- пазоне высоты значительных волн 0.2–1 м среднеквадратичная ошибка изме- рений высот составила не более 5 см для варианта с амортизатором и не более 6 см – без него. Аналогичные значения для периодов волн спектрального пика – 0.37 и 0.62 с, а для направлений таких волн – 50° и 65°. Поэтому при вы- соких рисках потери буев амортизатор может быть исключен из удерживающего устройства ценой незначительного ухудшения качества конечных данных.
Очевидным ограничением представленных в работе измерителей является необходимость их обслуживания в виде снятия данных и замены элементов питания. Несмотря на это, такой режим проведения измерений может быть приемлем для различных прибрежных задач или специализированных экспе- риментов, не требующих длительных постановок.
К преимуществам такого подхода можно отнести предельно низкую стои- мость, которая на 2–3 порядка ниже стоимости традиционных необслуживае- мых моделей. Это открывает широкие возможности для проведения натурных исследований волн на разрезах или сетках, в которых необходимо задейство- вать множество одинаковых измерителей. Кроме того, немаловажным досто- инством, на наш взгляд, является то, что в распоряжении исследователя ока- зываются исходные данные, считываемые непосредственно с датчика без ка- кой-либо предобработки. Это делает дальнейший анализ более прозрачным и гибким, а также позволяет варьировать алгоритм обработки в зависимости от поставленных задач.
1. Kuznetsov S., Saprykina Y. Nonlinear wave transformation in coastal zone: free and bound waves // Fluids. 2021. Vol. 6, iss. 10. 347. https://doi.org/10.3390/fluids6100347
2. Brown A. C., Paasch R. K. The accelerations of a wave measurement buoy impacted by breaking waves in the surf zone // Journal of Marine Science and Engineering. 2021. Vol. 9, iss. 2. 214. https://doi.org/10.3390/jmse9020214
3. Masson D. A case study of wave-current interaction in a strong tidal current // Journal of Physical Oceanography. 1996. Vol. 26, iss 3. P. 359–372. https://doi.org/10.1175/1520- 0485(1996)026<0359:ACSOWI>2.0.CO;2
4. Goryachkin Yu. N., Udovik V. F., Haritonova L. V. Ocenki parametrov potoka nano- sov u zapadnogo berega Bakal'skoy kosy pri prohozhdenii sil'nyh shtormov v 2007 godu // Morskoy gidrofizicheskiy zhurnal. 2010. № 5. S. 42–51. EDN TOERXH.
5. Saprykina Y. V., Samiksha S. V., Kuznetsov S. Yu. Wave climate variability and occur- rence of mudbanks along the southwest coast of India // Frontiers in Marine Science. 2021. Vol. 8. 671379. https://doi.org/10.3389/fmars.2021.671379
6. Influence of wave climate on intra and inter-annual nearshore bar dynamics for a sandy beach / N. Andreeva [et al.] // Geosciences. 2021. Vol. 11, iss. 5. 206. https://doi.org/10.3390/geosciences11050206
7. Goryachkin Yu. N., Kos'yan R. D. Obrazovanie novogo ostrova u beregov Kryma // Oke- anologiya. 2020. T. 60, № 2. S. 323–330. EDN PGHSZT. https://doi.org/10.31857/S0030157420020033
8. Influence of beach erosion during wave action in designed artificial sandy beach using XBeach model: profiles and shoreline / Y. Zhou [et al.] // Journal of Marine Science and Engineering. 2023. Vol. 11, iss. 5. 984. https://doi.org/10.3390/jmse11050984
9. Ocean surface wind estimation from waves based on small GPS buoy observations in a bay and the open ocean / T. Shimura [et al.] // Journal of Geophysical Research: Oceans. 2022. Vol. 127, iss. 9. e2022JC018786. https://doi.org/10.1029/2022jc018786
10. Divinskiy B. V., Kuklev S. B. Eksperiment po issledovaniyu parametrov vetrovogo volneniya na shel'fe Chernogo morya // Okeanologiya. 2022. T. 62, № 1. S. 14–19. EDN UWBPIX. https://doi.org/10.31857/S003015742201004X
11. Measurements of nearshore ocean-surface kinematics through coherent arrays of free- drifting buoys / E. Rainville [et al.] // Earth System Science Data. 2023. Vol. 15, iss. 11. P. 5135–5151. https://doi.org/10.5194/essd-15-5135-2023
12. Nearshore wave buoy data from southeastern Australia for coastal research and man- agement / M. A. Kinsela [et al.] // Scientific Data. 2024. Vol. 11, iss. 1. 190. https://doi.org/10.1038/s41597-023-02865-x
13. A surface kinematics buoy (SKIB) for wave-current interaction studies / P. Veras Guimarães [et al.] // Ocean Science. 2018. Vol. 14, iss. 6. P. 1449 –1460. https://doi.org/10.5194/os-14-1449-2018
14. Yurovsky Y. Yu., Dulov V. A. MEMS-based wave buoy: Towards short wind-wave sensing // Ocean Engineering. 2020. Vol. 217. 108043. https://doi.org/10.1016/j.oceaneng.2020.108043
15. OpenMetBuoy-v2021: an easy-to-build, affordable, customizable, open-source in- strument for oceanographic measurements of drift and waves in sea ice and the open ocean / J. Rabault [et al.] // Geosciences. 2022. Vol. 12, iss. 3. 110. https://doi.org/10.3390/geosciences12030110
16. The wavedrifter: a low-cost IMU-based Lagrangian drifter to observe steepening and overturning of surface gravity waves and the transition to turbulence / F. Feddersen [et al.] // Coastal Engineering Journal. 2024. Vol. 66, iss. 1. P. 44 –57. https://doi.org/10.1080/21664250.2023.2238949
17. Joosten H. Directional wave buoys and their elastic mooring // International Ocean Sys- tems. 2006. Vol. 10, iss. 4. P. 18–21.
18. Yurovsky Yu. Yu., Dulov V. A. Compact low-cost Arduino-based buoy for sea surface wave measurements // Proceedings of Progress in Electromagnetic Research Symposium – Fall (PIERS – FALL), 19–22 November 2017. Singapore : IEEE, 2017. P. 2315–2322. https://doi.org/10.1109/PIERS-FALL.2017.8293523
19. Issledovanie spektrov morskogo volneniya v shirokom diapazone dlin voln po sput- nikovym i kontaktnym dannym / V. G. Bondur [i dr.] // Issledovanie Zemli iz kos- mosa. 2016. № 1–2. S. 7–24. EDN VTOVJF. https://doi.org/10.7868/S0205961416010048
20. Smolov V. E., Rozvadovskiy A. F. Primenenie platformy Arduino dlya registra- cii vetrovyh voln // Morskoy gidrofizicheskiy zhurnal. 2020. T. 36, № 4. S. 467–479. EDN AKIIBG. https://doi.org/10.22449/0233-7584-2020-4-467-479
21. Longuet-Higgins M. S., Cartwright D. E., Smith N. D. Observations of the Directional Spectrum of Sea Waves Using the Motions of a Floating Buoy // Ocean wave spectra : Proceedings of a Conference, Easton, Maryland, May 1–4, 1961. Englewood Cliffs : Prentice-Hall, 1961. P. 111–132.
22. Ashton I. G. C., Johanning L. On errors in low frequency wave measurements from wave buoys // Ocean Engineering. 2015. Vol. 95. P. 11–22. https://doi.org/10.1016/j.oceaneng.2014.11.033
23. Stewart R. H. A discus-hulled wave measuring buoy // Ocean Engineering. 1977. Vol. 4, iss. 2. P. 101–107. https://doi.org/10.1016/0029-8018(77)90013-0